Seri Robot Las


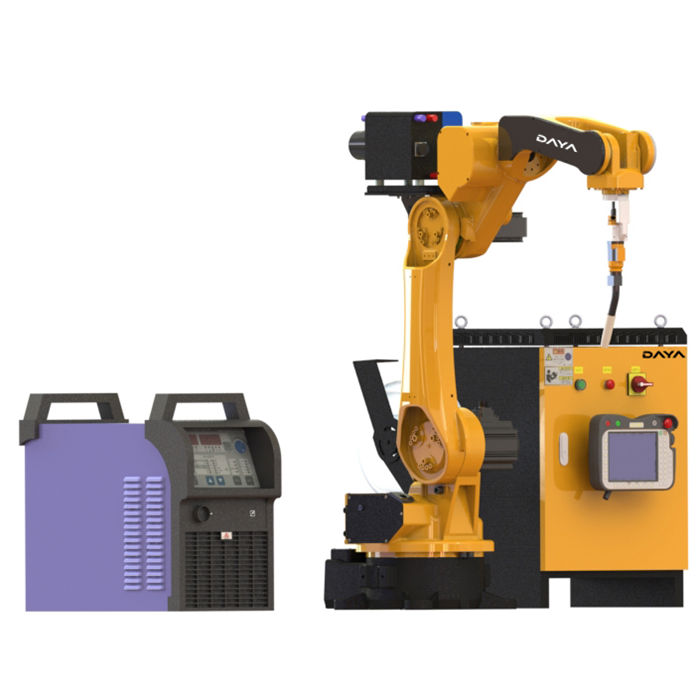

Robot las

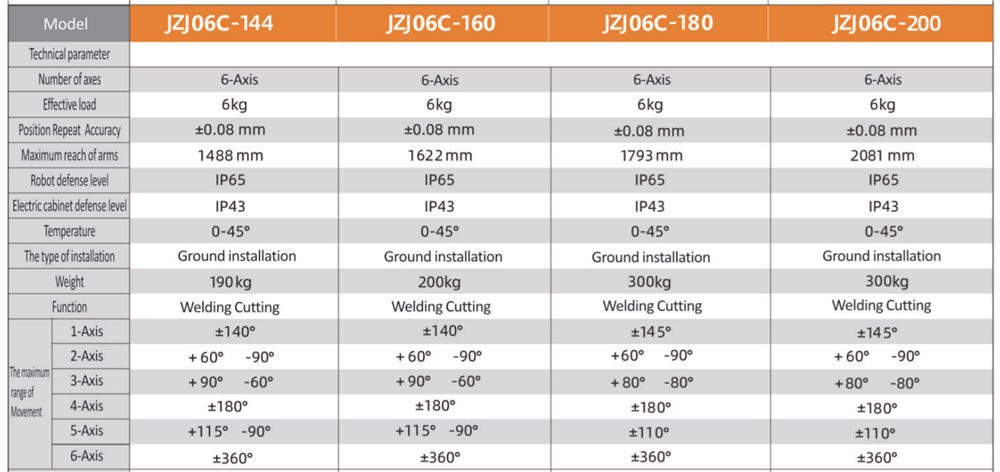
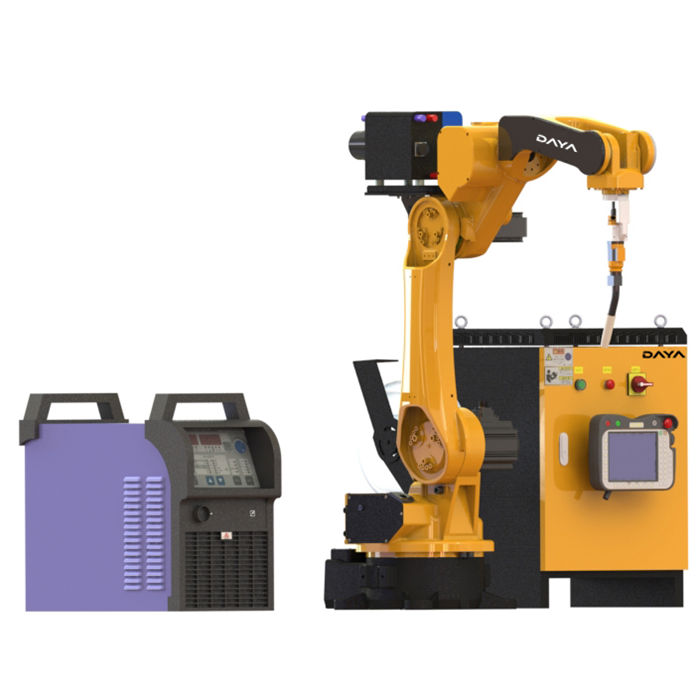
Seri robot las JZJ06C-180
Seri robot las JZJ06C-144

Seri robot las JZJ06C-160

Seri robot las JZJ06C-200
Pambuka ringkes
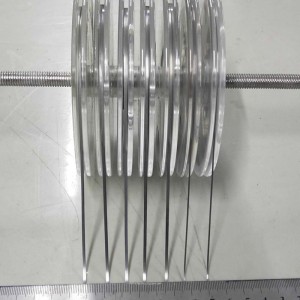
Robot las minangka robot industri sing ngelas (kalebu nglereni lan nyemprot). Miturut definisi organisasi internasional kanggo Standardisasi (ISO) manawa robot industri kalebu robot las standar, robot industri minangka manipulator sing bisa diprogram kanthi multi-tujuan, kanthi telung sumbu utawa bisa diprogram, sing digunakake ing bidang otomasi industri. Kanggo adaptasi karo macem-macem aplikasi, antarmuka mekanik sumbu pungkasan robot biasane dadi flange penghubung, sing bisa disambung karo macem-macem alat utawa efek pungkasan. Robot las yaiku nginstal tongs las utawa las (cutting) ing flange poros pungkasan robot industri, supaya bisa ngelas, nglereni utawa nyemprot termal.
Las robot yaiku nggunakake alat sing bisa diprogram kanthi mekanis (robot), sing ngotomatisasi proses las kanthi nindakake las lan nangani bagean kasebut. Proses kayata las busur logam gas, sanajan asring otomatis, durung mesthi padha karo las robot, amarga operator manungsa kadang nyiapake bahan sing arep dilas. Las robot umume digunakake kanggo las titik resistensi lan las busur ing aplikasi produksi dhuwur, kayata industri otomotif.
Pengelasan robot minangka aplikasi robotika sing relatif anyar, sanajan robot pisanan diwiwiti ing industri AS sajrone taun 1960an. Panggunaan robot ing las durung diwiwiti nganti taun 1980an, nalika industri otomotif wiwit nggunakake robot kanthi akeh kanggo welding spot. Wiwit kuwi, nomer robot sing digunakake ing industri lan nomer lamarane saya akeh. Ing taun 2005, luwih saka 120.000 robot digunakake ing industri Amerika Utara, udakara separo kanggo las. [1] Wutah utamane diwatesi dening biaya peralatan sing dhuwur, lan watesan kanggo aplikasi produksi dhuwur.
Las busur robot wis wiwit tuwuh kanthi cepet, lan saiki udakara 20% aplikasi robot industri. Komponen utama robot las busur yaiku manipulator utawa unit mekanik lan kontroler, sing dadi "otak" robot. Manipulator yaiku sing nggawe robot bisa obah, lan desain sistem kasebut bisa dikategorikake dadi sawetara jinis umum, kayata SCARA lan robot koordinat kartesian, sing nggunakake sistem koordinat sing beda kanggo ngarahake mesin.
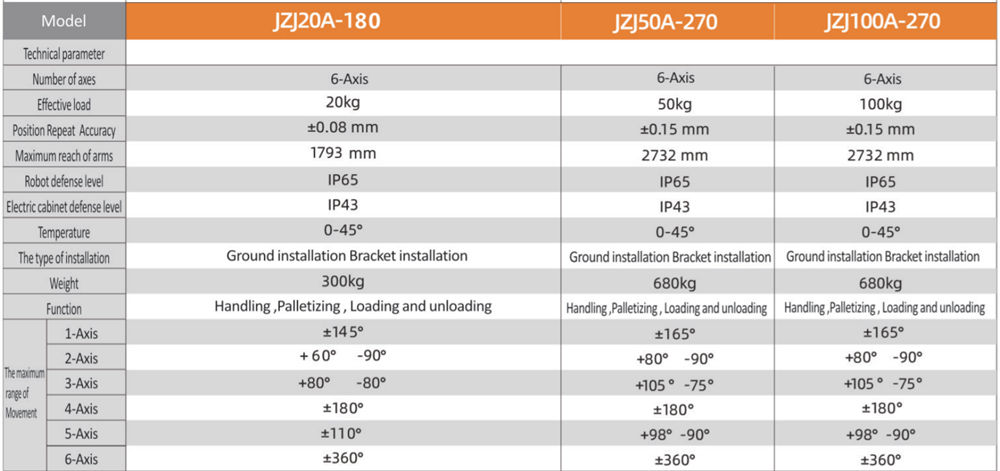
Parameter Teknis Seri Welding